AMOROSO Catalogue
Algorithms


YOLOv5
A widely-used real-time object detection library in computer vision, available in PyTorch and easily deployable across platforms with Ultralytics.
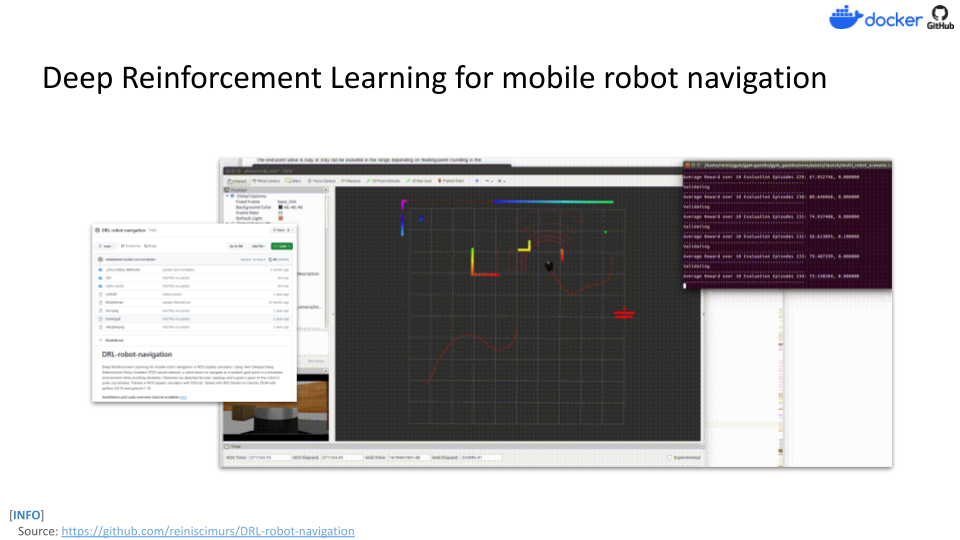
Robot Navigation using Deep Reinforcement Learning
Deep Reinforcement Learning for mobile robot navigation in ROS Gazebo simulator. Using Twin Delayed Deep Deterministic Policy Gradient (TD3) neural network, a robot learns to navigate to a random goal point in a simulated environment while avoiding obstacles. Obstacles are detected by laser readings and a goal is given to the robot in polar coordinates. Trained in ROS Gazebo simulator with PyTorch. Tested with https://github.com/PXLAIRobotics/ROSNoeticDocker.

ORB-SLAM2
A real-time SLAM library for monocular, stereo and RGB-D cameras that computes the camera trajectory and a sparse 3D reconstruction.
Get Started