AMOROSO Catalogue
Supporting Infrastructure Tools


ROSNoeticDocker
This repository contains the necessary elements (code and artifacts) to build and run a ROS Noetic container suitable to execute GUI applications in Nvidia and non-Nvidia docker environments. It includes the possibility to run simulations for the TurtleBot 3 robot and the AR.Drone.
The container is equipped with a few development and network-debug tools such as vim, tmux, git, ping-utils, … in order to program the robot and to diagnose any issue.
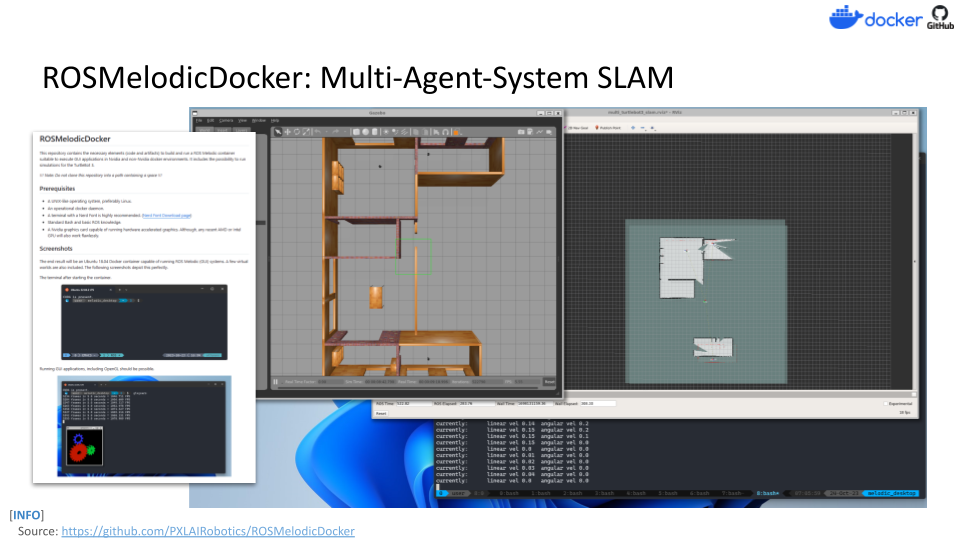
ROSMelodicDocker
This repository contains the necessary elements (code and artifacts) to build and run a ROS Melodic container suitable to execute GUI applications in Nvidia and non-Nvidia docker environments. It includes the possibility to run simulations for the TurtleBot 3.
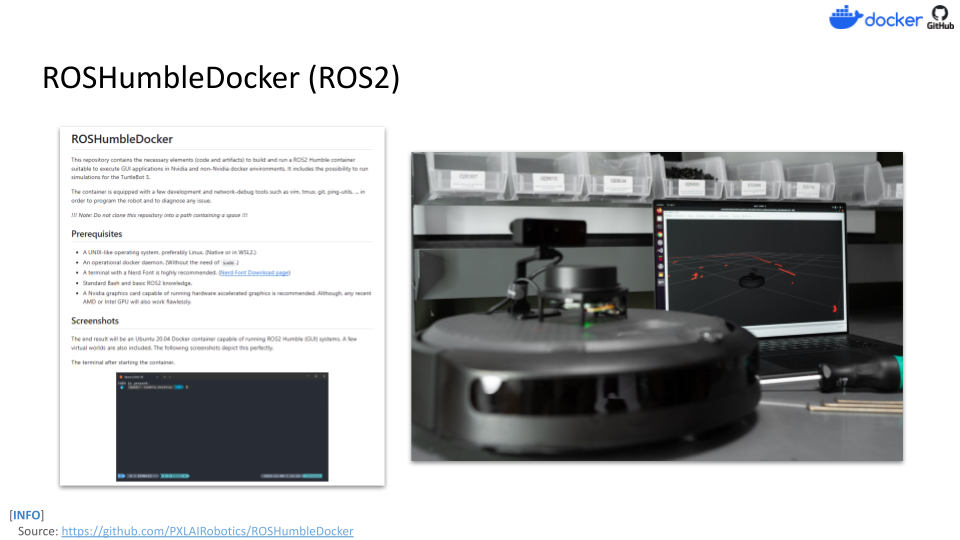
ROSHumbleDocker
This repository contains the necessary elements (code and artifacts) to build and run a ROS2 Humble container suitable to execute GUI applications in Nvidia and non-Nvidia docker environments. It includes the possibility to run simulations for the TurtleBot 3.
The container is equipped with a few development and network-debug tools such as vim, tmux, git, ping-utils, … in order to program the robot and to diagnose any issue.
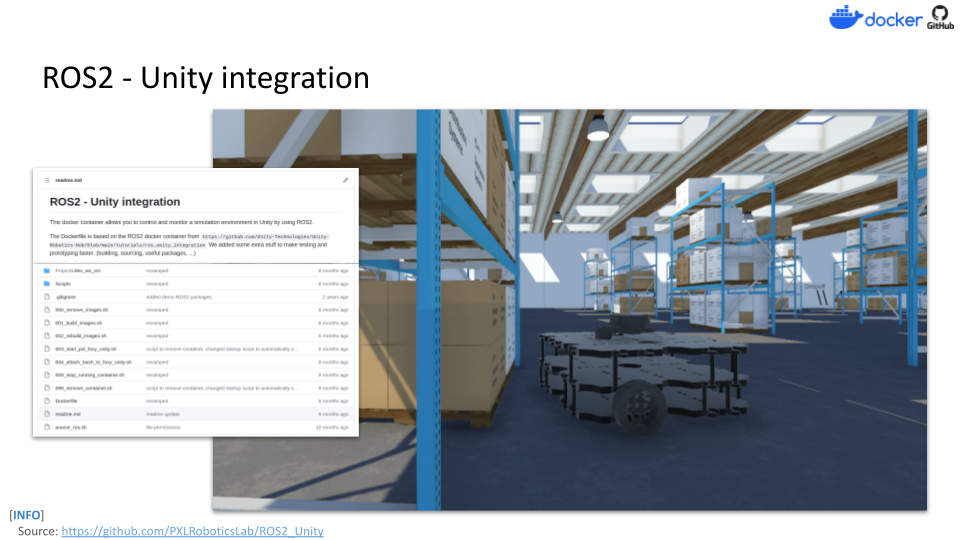
ROS2 Unity Integration
This docker container allows you to control and monitor a simulation environment in Unity by using ROS2.
The Dockerfile is based on the ROS2 docker container from https://github.com/Unity-Technologies/Unity-Robotics-Hub/blob/main/tutorials/ros_unity_integration. We added some extra stuff to make testing and prototyping faster. (building, sourcing, useful packages, …)
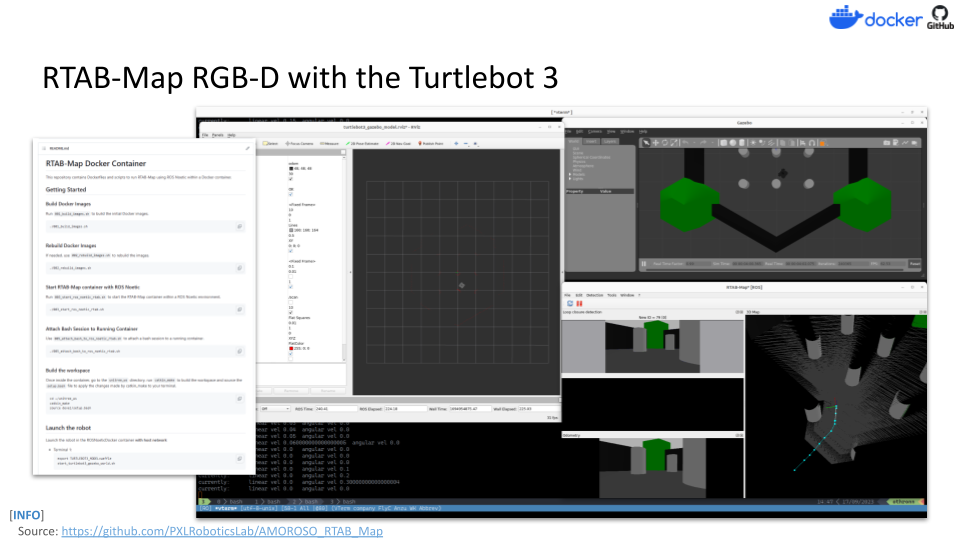
RTAB-Map LiDAR with the Turtlebot 3
This repository contains Dockerfiles and scripts to run RTAB-Map using ROS Noetic within a Docker container.
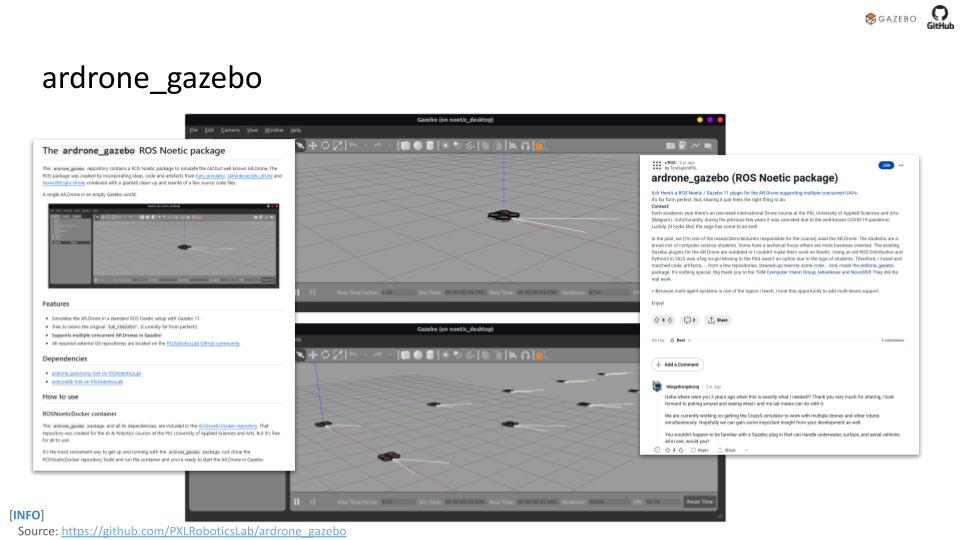
The ardrone_gazebo ROS Noetic package
This ardrone_gazebo repository contains a ROS Noetic package to simulate the old but well known AR.Drone. The ROS package was created by incorporating ideas, code and artefacts from tum_simulator, tahsinkose/sjtu_drone and NovoG93/sjtu-drone combined with a (partial) clean-up and rewrite of a few source code files.
Get Started